



















淮沭新(xīn)河位于江蘇省,興建于1958年,由二河及淮沭河兩段組成,全長(cháng) 97.5 公(gōng)裏,是分(fēn)淮入沂工(gōng)程的一部分(fēn),有(yǒu)洩洪、調蓄、航運等作(zuò)用(yòng)。它一方面分(fēn)洩了洪澤湖(hú)洪水,行洪能(néng)力 3000 立方米每秒(miǎo);另一方面,當沂泗水豐而淮水偏枯時,可(kě)調沂泗水經中(zhōng)運河、二河由二河閘倒入洪澤湖(hú),補給淮北平原灌溉,保障連雲港市用(yòng)水,是淮河和沂沭泗流域相互調度、綜合利用(yòng)的一項多(duō)功能(néng)工(gōng)程。
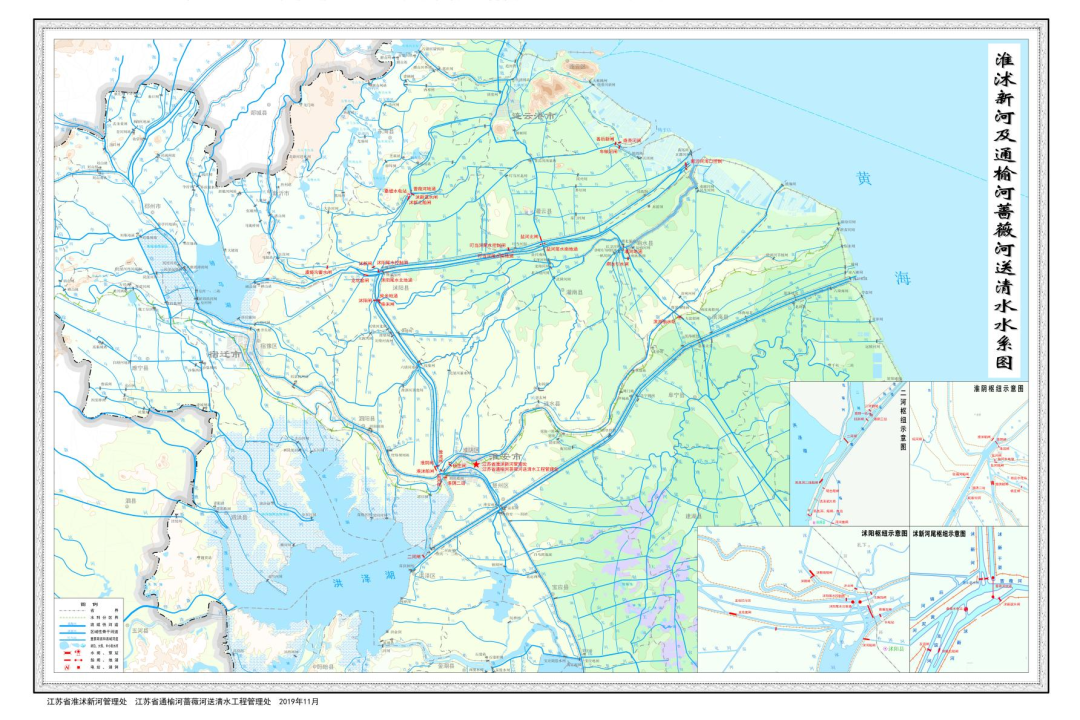
淮沭新(xīn)河水系圖
淮沭新(xīn)河河道設有(yǒu)水閘、船閘、泵站等一系列水工(gōng)建築。這些水工(gōng)建築經過長(cháng)年累月的運行,容易出現例如裂縫、凹坑、侵蝕等損壞,由于這些損壞發生在水工(gōng)建築物(wù)的水下部分(fēn),日常技(jì )術管理(lǐ)工(gōng)作(zuò)檢查難以實施,因而存在發現不及時等問題。
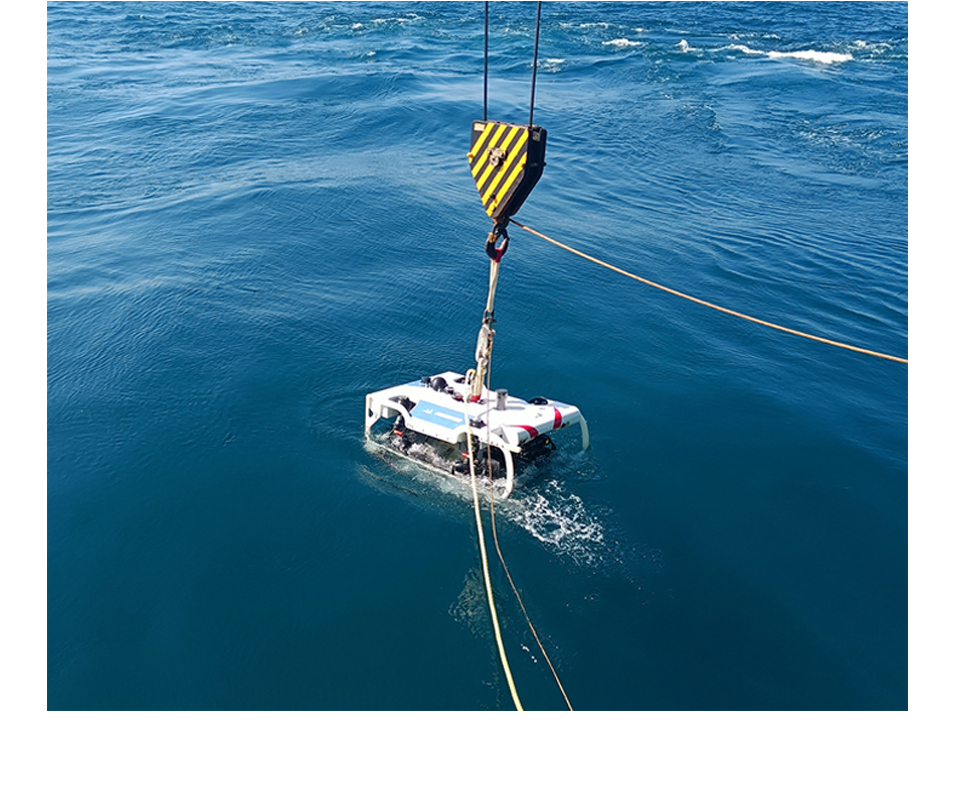
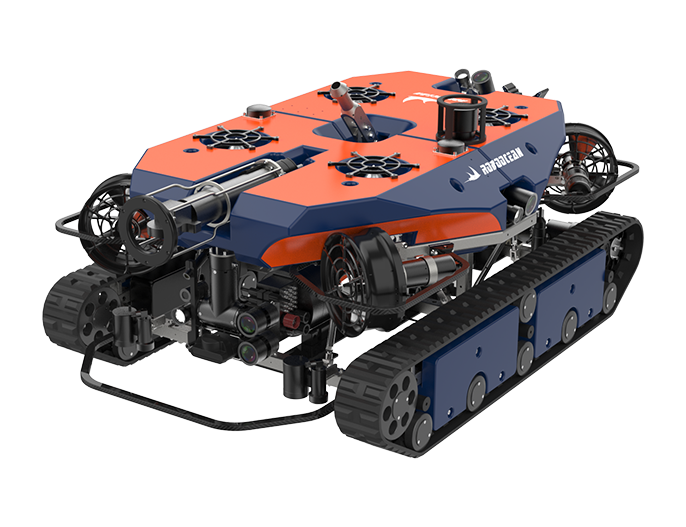
現在常用(yòng)的檢測方式仍是雇傭潛水員進行下水檢測,淮沭新(xīn)河自修建起至2020年一直采用(yòng)這種傳統的檢測方式。2021年起,我公(gōng)司和江蘇省淮沭新(xīn)河展開合作(zuò),檢測方式由原來的潛水員入水排查改為(wèi)纜控式水下機器人(ROV)智能(néng)化巡檢,至今已完成多(duō)次檢測任務(wù),收到了業主單位的好評。

本次工(gōng)程服務(wù)檢測内容覆蓋多(duō)個水工(gōng)工(gōng)程,包括水閘工(gōng)程的上遊鋪蓋、底闆,下遊護坦,閘門等;泵站工(gōng)程的引渠、前池、進出水池、護坡、閘門等;船閘工(gōng)程的閘室、底樞、門庫、閥門等;地涵工(gōng)程的岸牆、護坡、進出水口、洞身、伸縮縫、止水、頂管等。采用(yòng)纜控式水下機器人進行光學(xué)及聲學(xué)檢測、同時利用(yòng)水下機械臂進行輔助作(zuò)業。
長(cháng)時間不間斷檢測
高效安(ān)全
對比傳統的檢測方式,水下機器人檢測有(yǒu)諸多(duō)優點,其中(zhōng)之一就是高效安(ān)全。水下環境不比陸地,潛水員無法長(cháng)時間進行水下作(zuò)業,這可(kě)能(néng)需要他(tā)們多(duō)次下水才能(néng)完成某一河段的檢測工(gōng)作(zuò)。
纜控式水下機器人作(zuò)業時間不受限制,按照規範,岸上操作(zuò)員至多(duō)可(kě)以連續工(gōng)作(zuò)4個小(xiǎo)時,減少下水的次數的同時節省了作(zuò)業的時間,也規避了水下作(zuò)業人員的安(ān)全隐患。

設備夜間入水檢測
同時搭載多(duō)種檢測設備
精(jīng)準科(kē)學(xué)
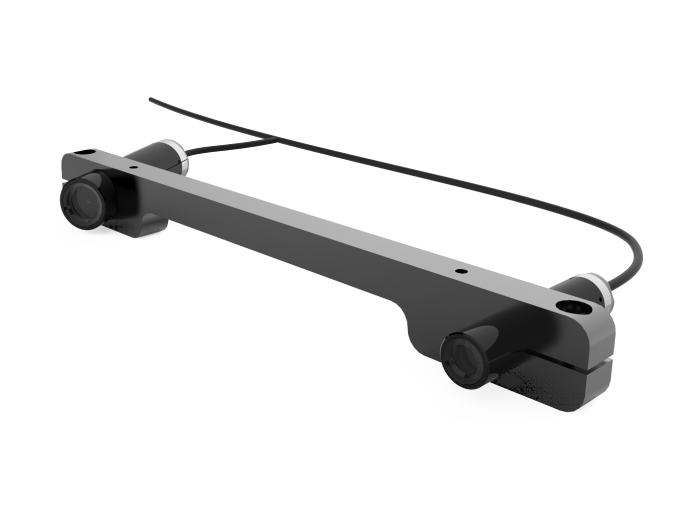
水下機器人檢測的另一大優點是精(jīng)準科(kē)學(xué)。所獲得的數據可(kě)以相互印證。水下機器人可(kě)以一次性搭載多(duō)種設備下水檢測,采集畫面可(kě)以在岸上的上位機實時監測。
潛水員若想要獲得同樣的結果,在水下操作(zuò)則複雜得多(duō)。水下想獲得清晰的光學(xué)影像要求很(hěn)嚴苛,在進行水工(gōng)建築的檢測時,水下環境過暗影像會不清晰,但攜帶的探照燈過亮又(yòu)會在建築表面形成反光,使得問題點不能(néng)被很(hěn)好的呈現,不利于後續工(gōng)作(zuò)的開展,水下機器人搭載的可(kě)調節照燈以及多(duō)個光學(xué)鏡頭可(kě)以獲得更有(yǒu)效的圖像。

左圖
潛水員持相機獲得的水下影像
右圖
ROV獲得的水下影像
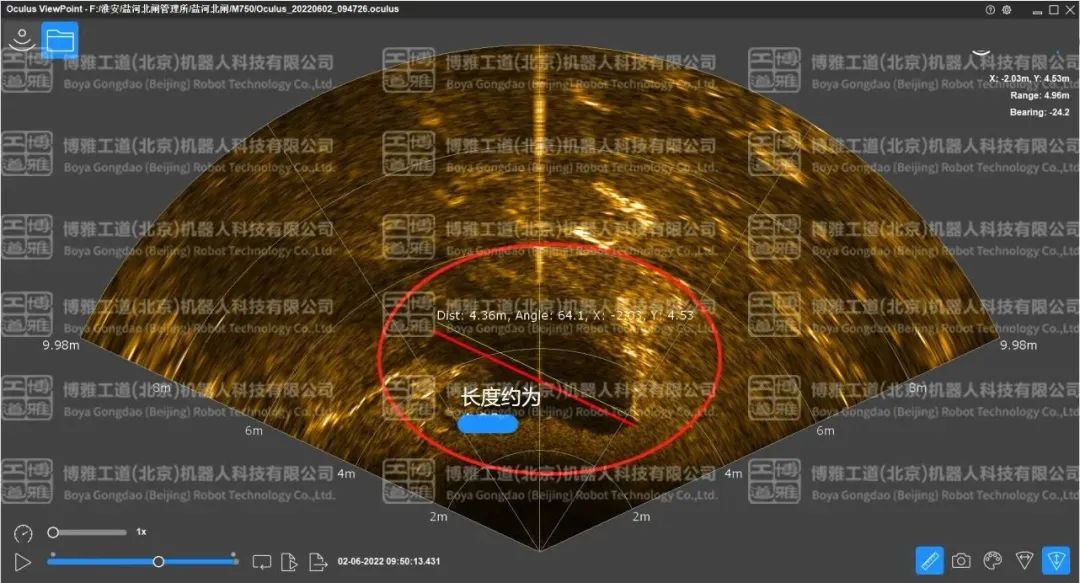
除了搭載光學(xué)鏡頭以采集的視頻圖像信息,水下機器人還可(kě)以同時攜帶多(duō)種聲呐,以滿足不同種類的檢測需求,例如多(duō)波束聲呐和管道聲呐,聲呐圖像一方面利于水下機器人在黑暗中(zhōng)行進,一方面能(néng)能(néng)更真實地反映水工(gōng)建築物(wù)的水下狀況。水下作(zuò)業完成後,工(gōng)程技(jì )術服務(wù)團隊根據聲呐圖像計算出準确的數據,出具(jù)檢測報告,對于淤積和裂痕的測量有(yǒu)着至關重要的作(zuò)用(yòng)。
節省資源,保障安(ān)全,精(jīng)準高效,博雅工(gōng)道一直緻力于推廣水下機器人優質(zhì)工(gōng)程服務(wù)。在未來,我們也會持續努力,研發制造更多(duō)智能(néng)的設備,為(wèi)我國(guó)水利工(gōng)程建設保駕護航。
聯系我們



