
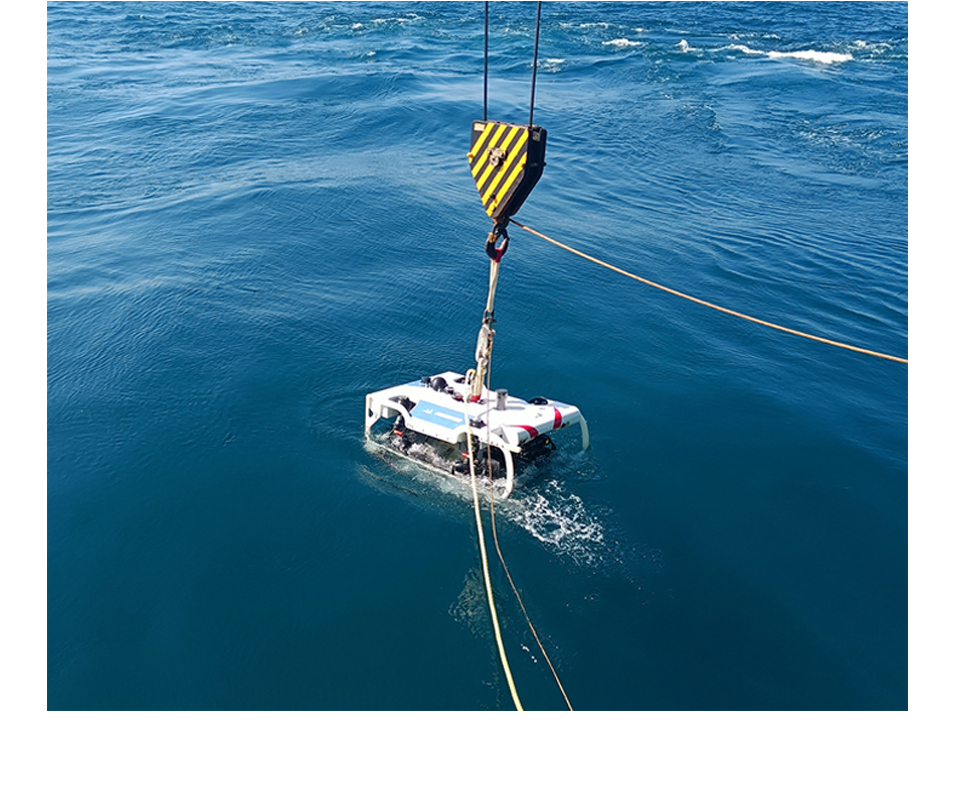


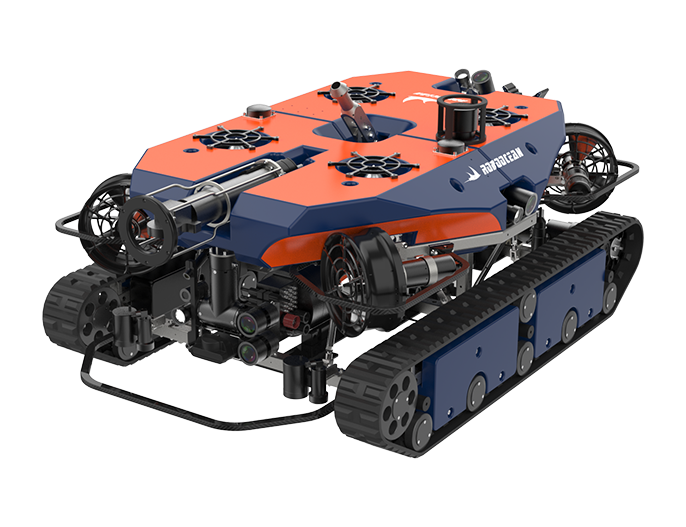

















7月28日,博雅工(gōng)道團隊與南網儲能(néng)公(gōng)司儲能(néng)科(kē)研院在惠蓄電(diàn)站進行了“深水、動水、渾水等複雜環境長(cháng)隧洞水下機器人應用(yòng)關鍵技(jì )術研究及裝(zhuāng)備研制項目”的驗收工(gōng)作(zuò)。經過一系列測試,機器人系統成功通過了耐水壓、水下運動、聲學(xué)光學(xué)檢測等驗收環節。

項目背景
長(cháng)隧洞水下檢測一直以來都是一個難題。引水隧洞長(cháng)時間受到水流沖刷,容易出現掉塊、露筋、裂縫和沖蝕等混凝土缺陷,這些問題無疑會對水電(diàn)站系統的安(ān)全性産(chǎn)生影響。
由于長(cháng)距離輸水隧洞檢修通道布置受限,不宜派遣潛水員進行水下檢測,而多(duō)采用(yòng)放空檢查的方式,但放空檢查不僅會影響工(gōng)程效益,有(yǒu)時還會危及隧洞結構的安(ān)全,有(yǒu)些隧洞不得不放棄這一部分(fēn)的檢查。
近年來,使用(yòng)水下機器人進行檢測已成為(wèi)主流。然而,以往市場上現有(yǒu)的水下機器人隻能(néng)滿足短距離的檢測要求,在長(cháng)距離隧洞進行檢測會産(chǎn)生線(xiàn)纜纏繞等安(ān)全問題。此次研發的水下機器人系統檢測距離長(cháng)達5.5千米,屬國(guó)内首次。

主要成果
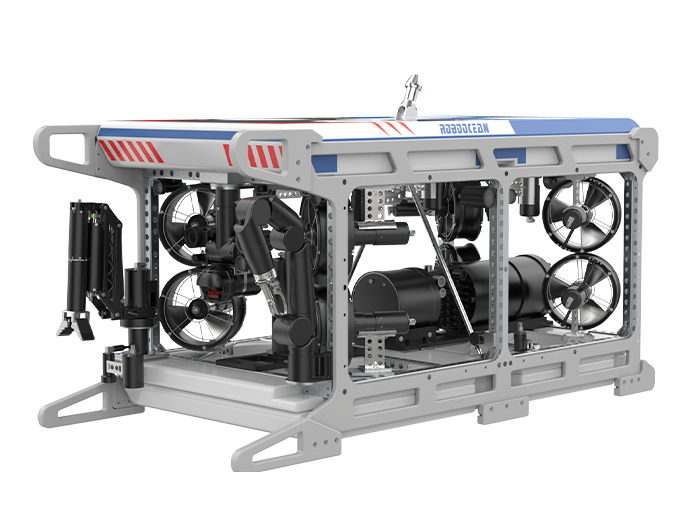
該項目始于2020年,從籌備到最終研制成功曆時三年。在這期間,項目突破了多(duō)項技(jì )術難點,包括超長(cháng)距離小(xiǎo)直徑零浮力臍帶纜系統的研制、水下有(yǒu)限空間内超高電(diàn)壓轉換、大型機器人360°全姿态運動控制、多(duō)傳感器融合的複雜電(diàn)控系統設計、路徑規劃與智能(néng)避障功能(néng)設計等。
項目顯著的創新(xīn)成果包括機器人水下360°全姿态控制保持功能(néng)、機器人抗水流擾動外形結構設計以及隧洞應急自主脫纜尋迹返航技(jì )術等。
360°全姿态運動
該項目不僅從科(kē)學(xué)角度解決了多(duō)項技(jì )術難題,同時也維護了水電(diàn)站的科(kē)學(xué)安(ān)全運行。它填補了市場上的空缺,并以高适應性、高效性、準确性和低成本的優勢滿足了各類檢修需求,創造了不可(kě)忽視的社會效益和經濟效益。
在驗收會上,南方電(diàn)網公(gōng)司的專家、高校教授和行業專家組成的專家組高度評價了該項目成果。他(tā)們認為(wèi),該項目充分(fēn)考慮了檢測作(zuò)業需求和用(yòng)戶體(tǐ)驗,不僅克服了較大的研發難度,還兼顧了創新(xīn)性和實用(yòng)性。此次項目計劃任務(wù)圓滿完成。
今後我們将持續發揮公(gōng)司技(jì )術優勢,在水下科(kē)技(jì )領域不斷航行,為(wèi)社會創造更多(duō)社會價值。
推薦産(chǎn)品
聯系我們



