



















近期,博雅工(gōng)道獲批海南省重點研發項目,将與中(zhōng)電(diàn)科(kē)海洋信息技(jì )術研究院、中(zhōng)國(guó)科(kē)學(xué)院半導體(tǐ)研究所、海南大學(xué)共同完成水上水下一體(tǐ)化無人智能(néng)觀測平台的開發工(gōng)作(zuò)。
填補技(jì )術空白
融合水面無人艇(USV)與水下無人潛航器(UUV)的一體(tǐ)化裝(zhuāng)備是海洋無人裝(zhuāng)備研究的前沿與熱門技(jì )術。
自 20 世紀 70 年代起,為(wèi)解決水下無人潛航器回收的問題,國(guó)外研制出了适合于船體(tǐ)挂載的回收裝(zhuāng)置,如日本東京大學(xué)的落座式水下固定回收裝(zhuāng)置,佛羅裏達大西洋大學(xué)的繩類回收裝(zhuāng)置,美國(guó)伍茲霍爾海洋研究院的錐形導向罩回收裝(zhuāng)置。這些裝(zhuāng)置雖能(néng)達到水下回收的目的,但都存在不同的問題。
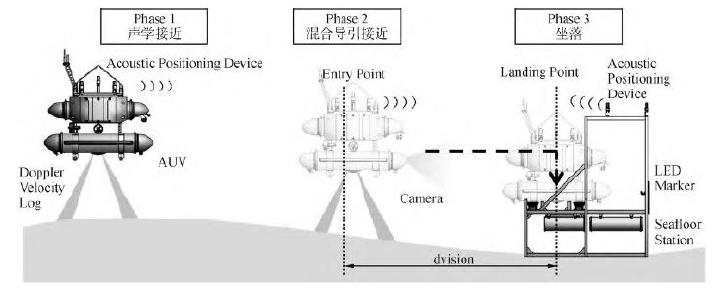
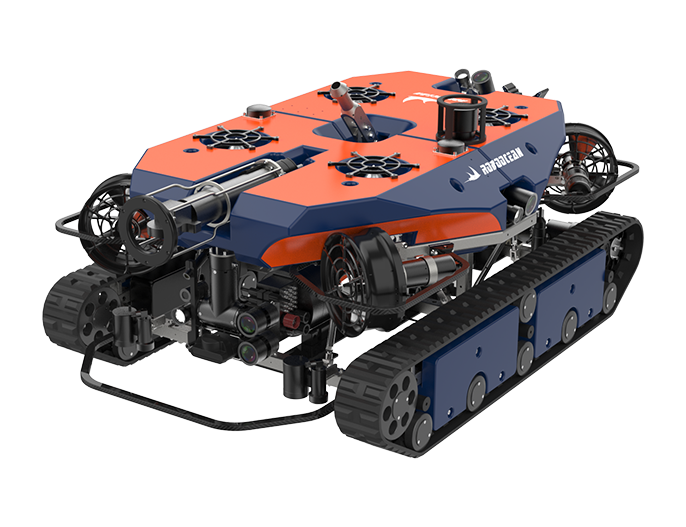
ri-TON2 坐(zuò)落式回收系統
我國(guó)海洋技(jì )術經過幾十年幾代人的奮鬥,正在飛速發展,水上水下設備都能(néng)夠獨立完成多(duō)種任務(wù)。但将二者結合的技(jì )術領域還處于發展的初期階段。關于水面無人艇與水下無人潛航器的協同技(jì )術與自主回收技(jì )術的研究相對較少,尤其對于可(kě)挂載于無人艇的水下無人潛航器自主布放回收裝(zhuāng)置尚無樣機産(chǎn)生。無人化、智能(néng)化、自主化、隐蔽化是海洋智能(néng)裝(zhuāng)備的發展趨勢,研究水上水下一體(tǐ)化協同技(jì )術迫在眉睫。
解決現有(yǒu)問題
水上水下整體(tǐ)化的設計可(kě)以解決現存的幾項問題。一是受環境影響大,海上環境複雜多(duō)變,而現階段無人潛航器的布放和回收方式都對天氣海況有(yǒu)一定的要求,能(néng)否完成任務(wù)需要“看天行事”。
二是布放回收系統成本高昂、隐蔽性差,現在主要的作(zuò)業方式是母船航行到指定位置後再用(yòng)起吊機進行相關工(gōng)作(zuò),整套系統結構複雜,體(tǐ)積大,成本高,容易被發現。
三是人員參與度高,如前文(wén)所述,海上環境複雜危險,布放回收等工(gōng)作(zuò)需要作(zuò)業人員在母船上進行操作(zuò),遇到惡劣天氣,很(hěn)有(yǒu)可(kě)能(néng)危及人身安(ān)全。

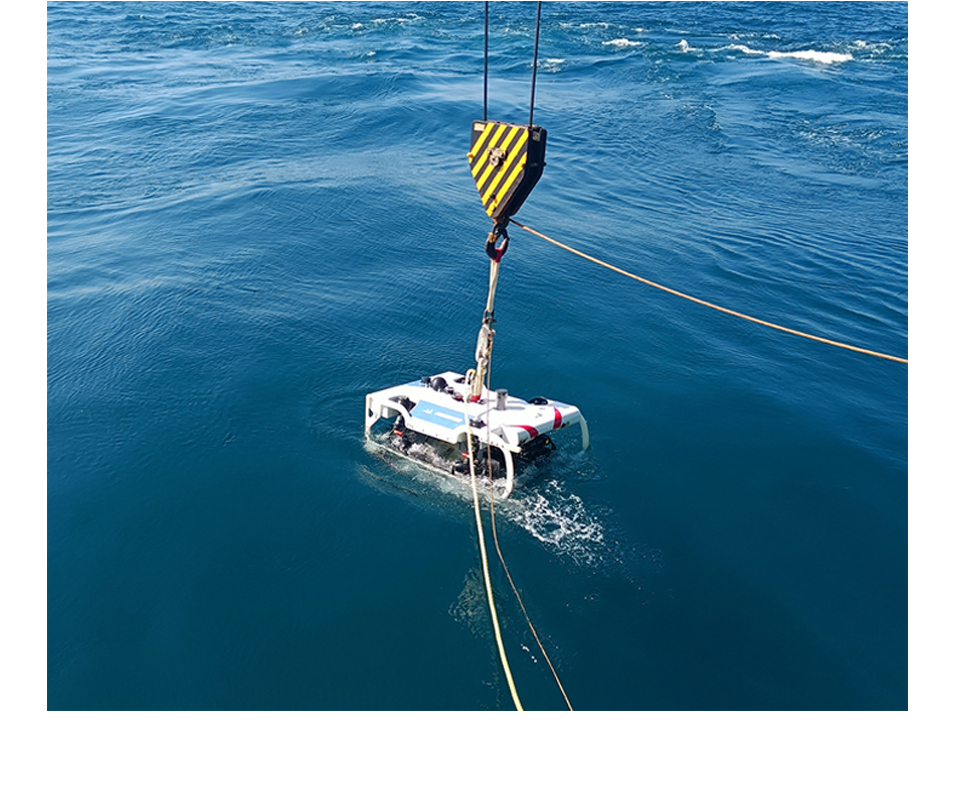
海上情況瞬息萬變
三個環節齊發展
研究項目主要分(fēn)為(wèi)三個課題,第一個子課題聚焦水上部分(fēn),進行水面無人艇的設計研發,實現高精(jīng)度航行;第二個子課題關注水下,進行水下觀測平台的開發,優化水下無人潛航器使其能(néng)夠與水面平台相互配合;第三個子課題結合水上水下,進行全自主水上水下一體(tǐ)化協同作(zuò)業平台的開發。
博雅工(gōng)道發揮自身優勢與技(jì )術積累,将負責水下部分(fēn)的研究工(gōng)作(zuò),包括結構、控制算法的設計優化,水聲定位、路徑規劃、目标定位标記技(jì )術研究等内容,除此之外也将協助水上水下協同作(zuò)業的部分(fēn)工(gōng)作(zuò)。
預期成果
本項目成果主要分(fēn)為(wèi)實體(tǐ)和系統兩個部分(fēn)。實體(tǐ)部分(fēn)針對水面無人艇、水下無人潛航器進行結構優化,重點突破挂載式水下無人潛航器自動收放裝(zhuāng)置技(jì )術,并進行樣機研制,實現水下無人潛航器挂載水面無人艇功能(néng),組成一體(tǐ)化全自主樣機;系統部分(fēn)針對水面無人艇、水下無人潛航器與自動收放裝(zhuāng)置,組建開發數據通訊系統與綜合控制系統,實現對整套系統樣機的遠(yuǎn)程任務(wù)部署與監控。最終通過海洋環境測試,在拟定的應用(yòng)場景内,對樣機系統的性能(néng)指标、使用(yòng)功能(néng)和應用(yòng)能(néng)力進行實測,完成項目成果評估。
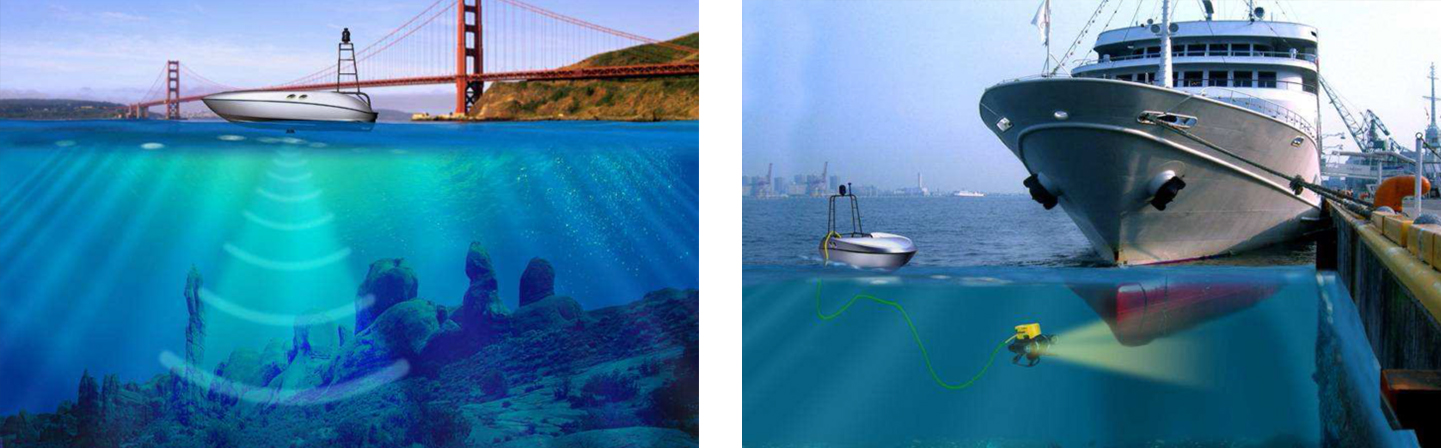
研制出的産(chǎn)品可(kě)以廣泛應用(yòng)在海洋工(gōng)程、測繪勘探、海洋牧場、巡邏執法、環保監測等多(duō)個領域。在極大降低成本的同時,可(kě)以創造良好的經濟價值。
試驗示範示意圖
“十四五”規劃中(zhōng)提出,要增強海洋科(kē)技(jì )創新(xīn)能(néng)力,聚焦深海科(kē)技(jì ),以搭建海洋科(kē)技(jì )創新(xīn)平台為(wèi)重點,彙聚全球海洋創新(xīn)要素,強化海洋重大關鍵技(jì )術創新(xīn),促進海洋科(kē)技(jì )成果轉化,建立開放協同高效的現代海洋科(kē)技(jì )創新(xīn)體(tǐ)系,着力打造深海科(kē)技(jì )創新(xīn)中(zhōng)心,增強海洋科(kē)技(jì )創新(xīn)驅動力。
水上水下一體(tǐ)化智能(néng)裝(zhuāng)備是海洋無人裝(zhuāng)備研究是實現裝(zhuāng)備安(ān)全持續作(zuò)業的關鍵技(jì )術之一,是協同高效的現代海洋科(kē)技(jì )創新(xīn)體(tǐ)系建設的方向之一。因此,研究水面無人艇與水下無人潛航器的一體(tǐ)化結合、構建海洋無人智能(néng)協同觀測平台具(jù)有(yǒu)重要意義。
推薦産(chǎn)品
聯系我們



